The result is a far more complete and accurate picture of the scene. MulDar reliably captures mirror-like surfaces and objects hidden behind clutter, the very cases where a single radar fails.
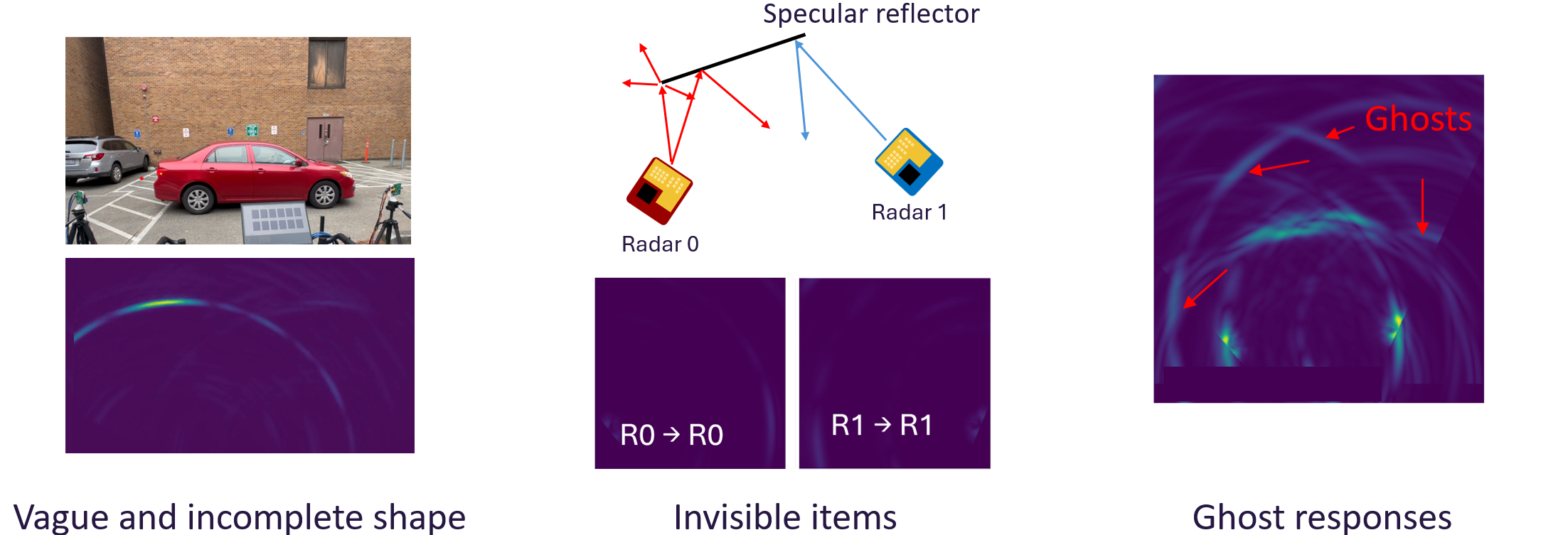
Mono-static mmWave channels are fundamentally limited by: sparsity and noise. Most surfaces act as specular mirrors at mmWave wavelengths, so a co-located TX and RX only sees energy from the narrow set of surfaces whose normal points back at the radar. Everything else reflects energy harmlessly away, leaving a sparse return in the received signal.
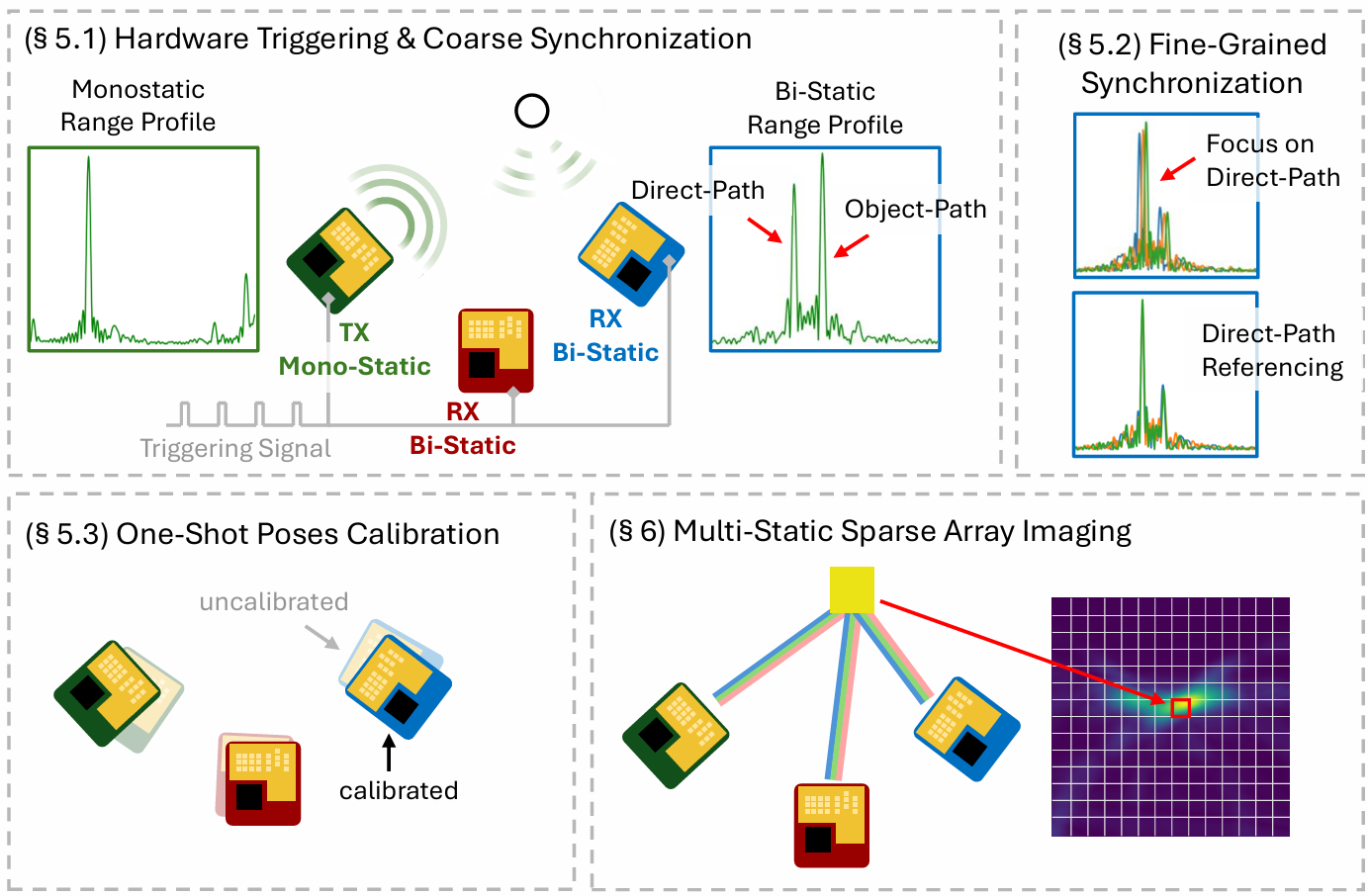
MulDar system overview
Distributed radars transmit in a round-robin schedule, the direct path between radars is used for phase synchronization, and a backprojection algorithm fuses mono-static and bi-static measurements for full scene reconstruction.
MulDar synchronizes bi-static with direct-path referencing
The bi-static channels is not perfect which introduces random frequency and phase offsets. MulDar corrects these offsets using the direct-path peak as a reference, enabling coherency across radars for multi-static imaging.
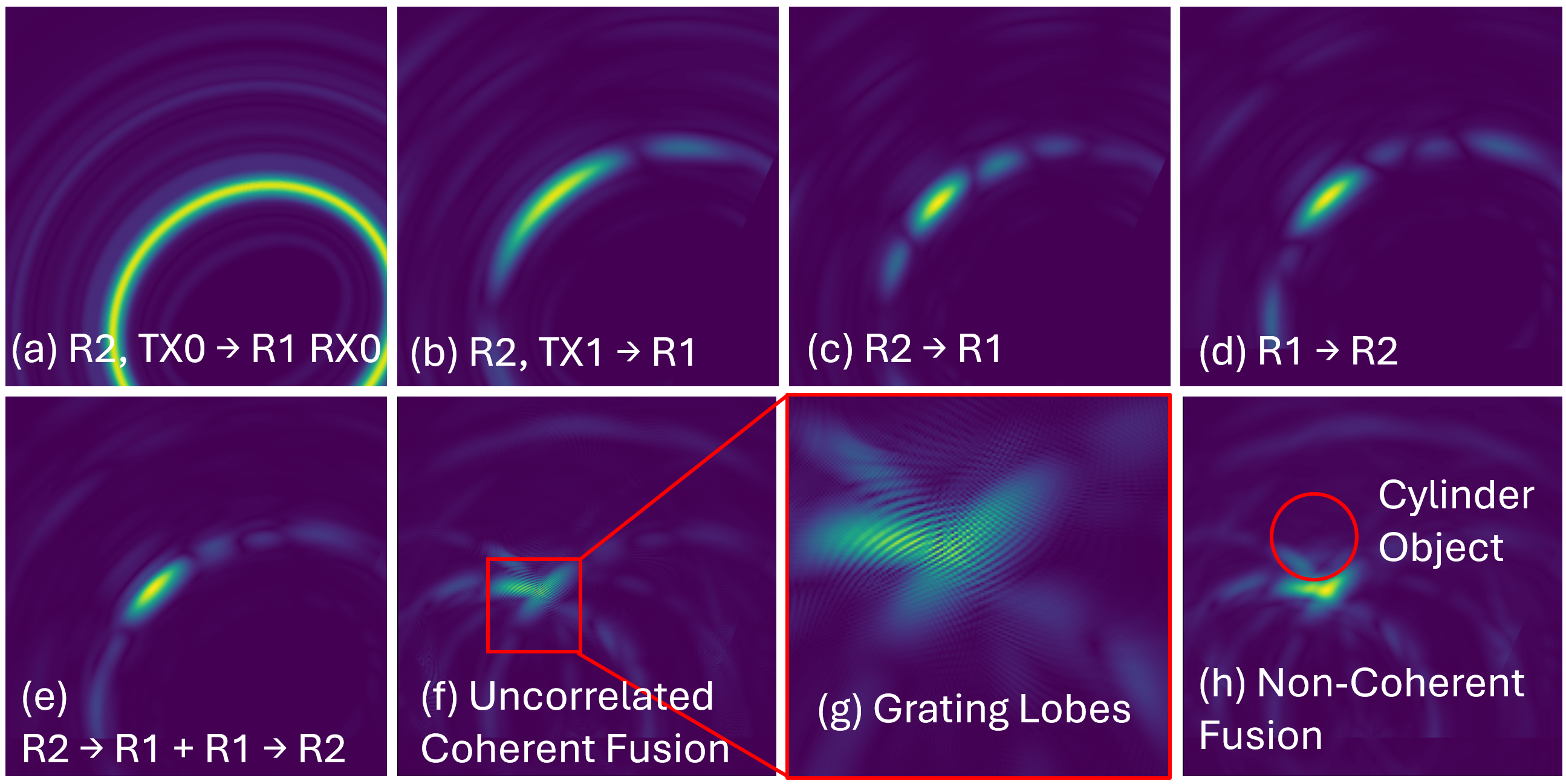
Channel fusion strategy: correlated channels are coherently combined for higher resolution and SNR, uncorrelated channels are non-coherently fused to add new viewpoint information.
We evaluate MulDar against two baselines: Mono, which fuses only mono-static reflections from each radar, and Multi, which fuses only the cross-radar bi-static channels. Across planar surfaces of different materials, deformed metal reflectors, and cluttered real-world scenes, MulDar consistently recovers geometry that both baselines miss. Mono-static radars see specular surfaces only as point reflections (or not at all), while bi-static-only fusion misses objects whose dominant return is mono-static. MulDar's joint fusion captures both, producing complete and ghost-free reconstructions.
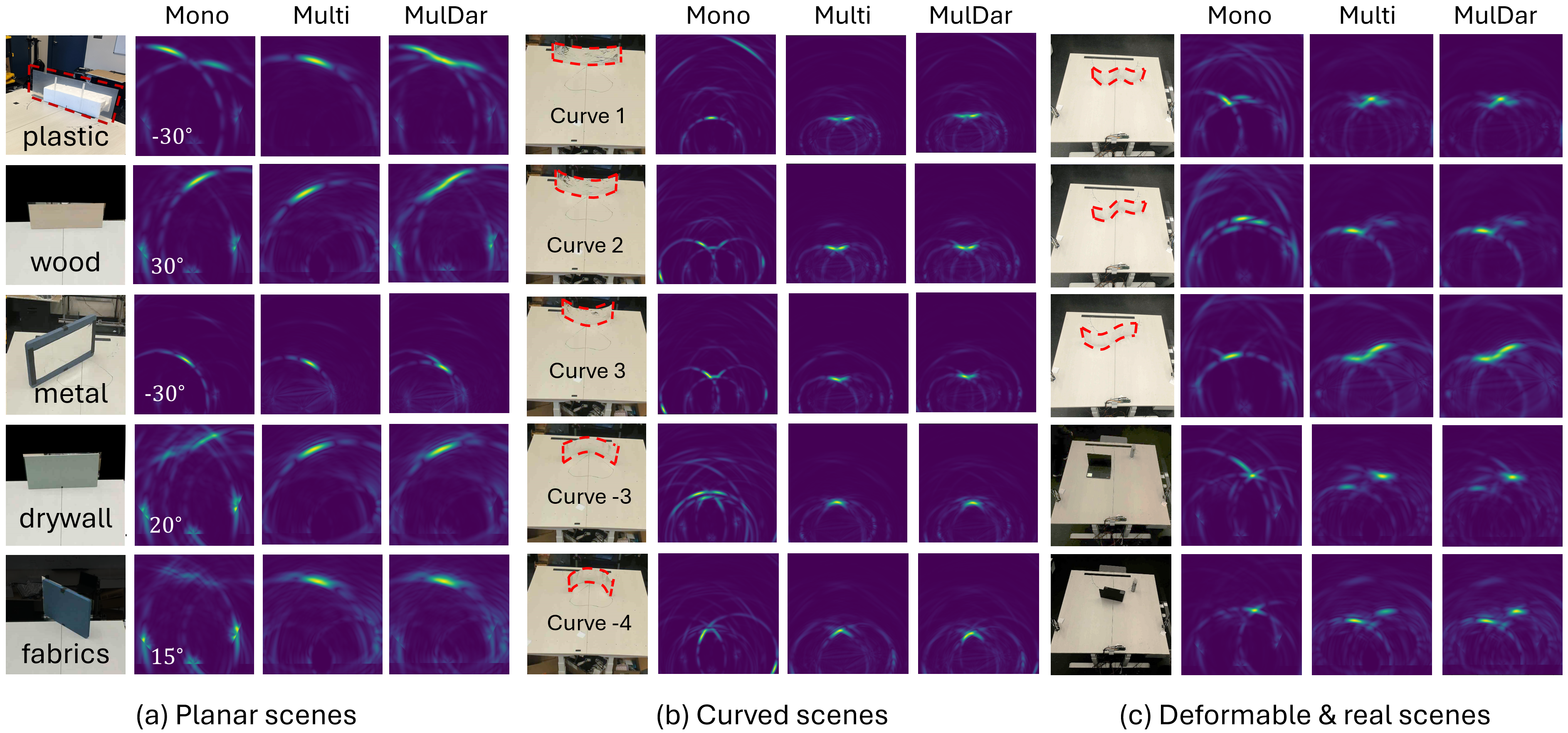
Qualitative comparison across planar surfaces, deformed reflectors, and real-world scenes. MulDar (right) reconstructs objects that are invisible or ghost-distorted in the mono-static (left) and multi-static-only (center) baselines.
MulDar has better coverage to the objects. We measure the two-way Chamfer distance between the reconstructed point cloud and the ground truth across planar surfaces of five materials: metal, plastic, wood, fabric, and drywall. They were rotated through a wide range of incidence angles. MulDar reduces the average Chamfer distance by 72.62% on metal, 81.03% on plastic, 69.47% on wood, 68.47% on fabric, and 42.38% on drywall, for an overall 66.79% improvement over the mono-static baseline.
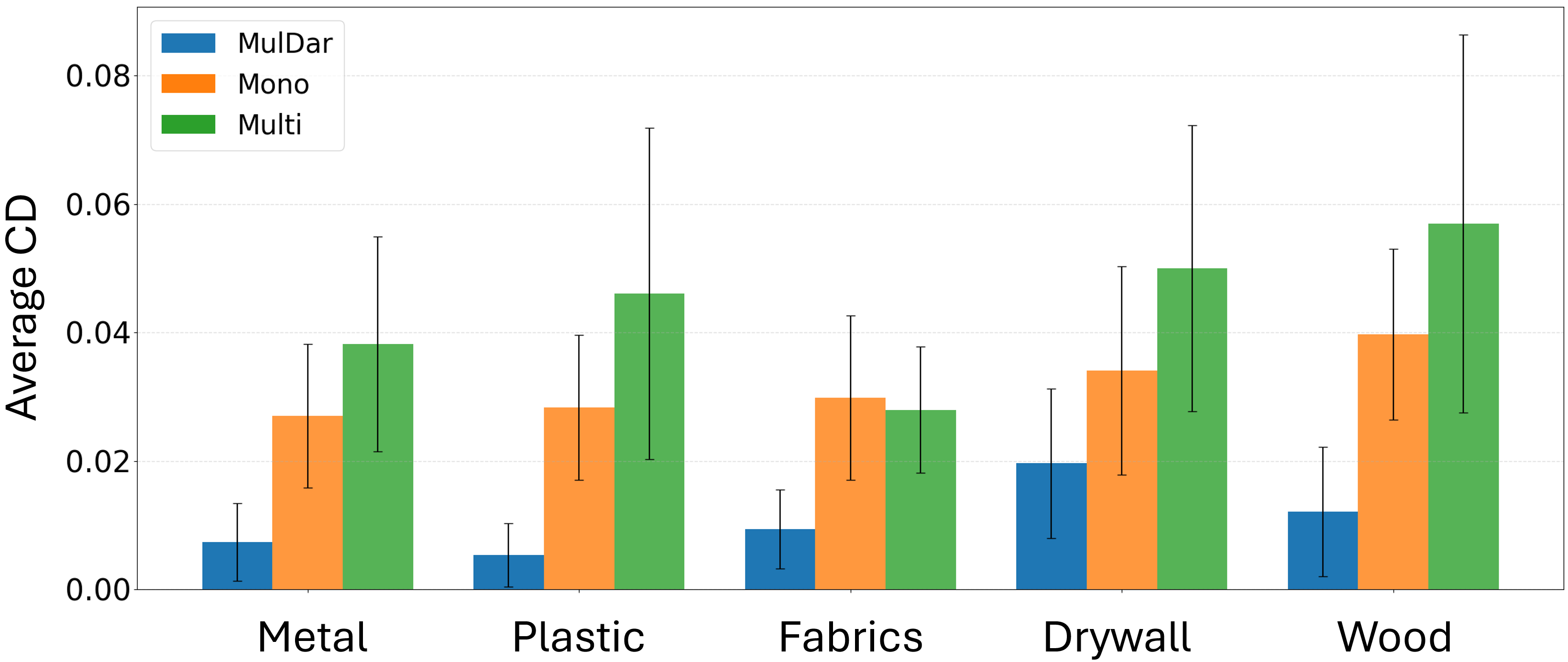
Average Chamfer distance across planar surfaces of five materials. MulDar achieves a 66.79% reduction over the mono-static baseline.
MulDar in both indoor and outdoor scenarios.
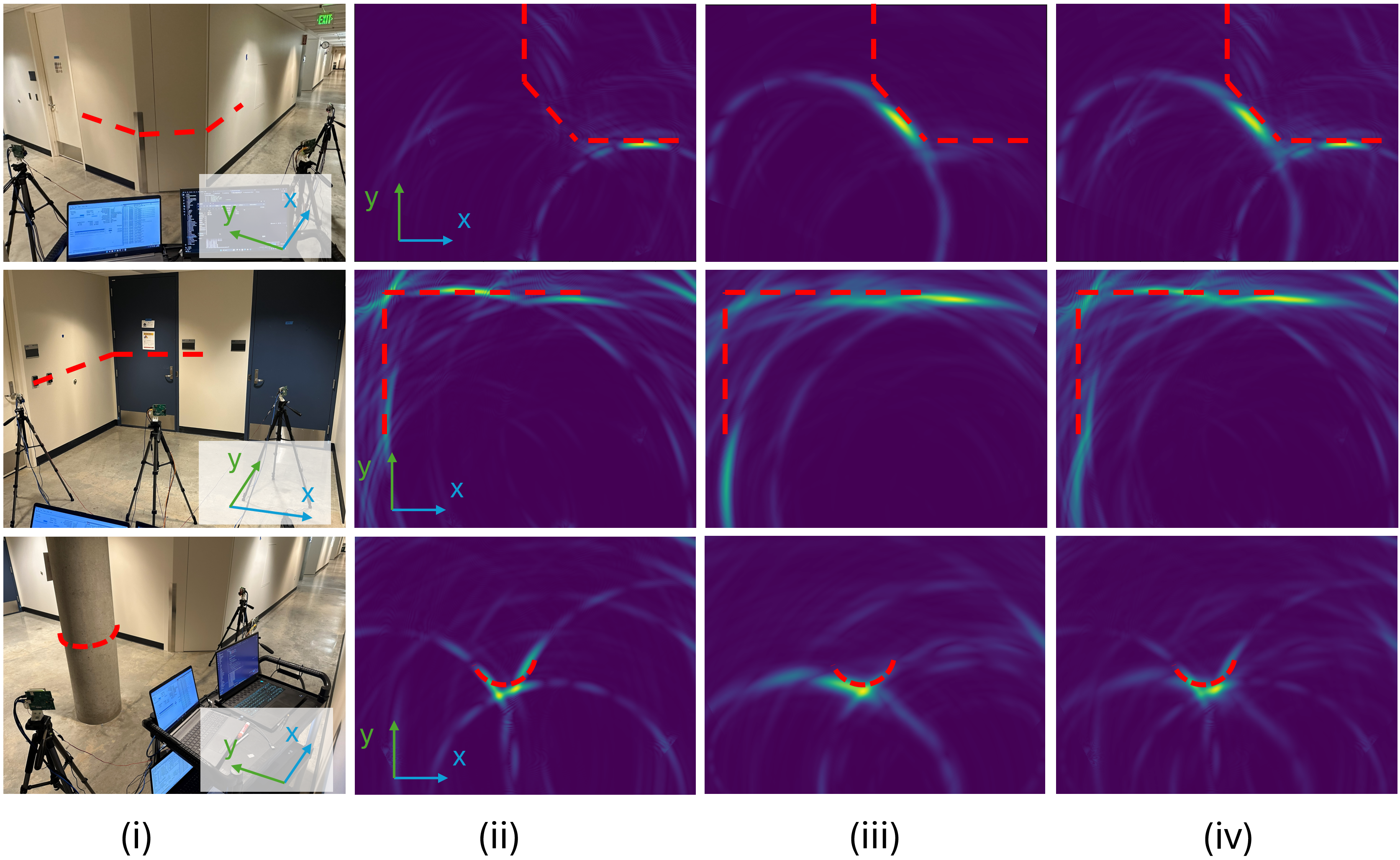
Indoor evaluation: MulDar images corridor corners, open areas, and pillars that mono-static radars miss entirely.
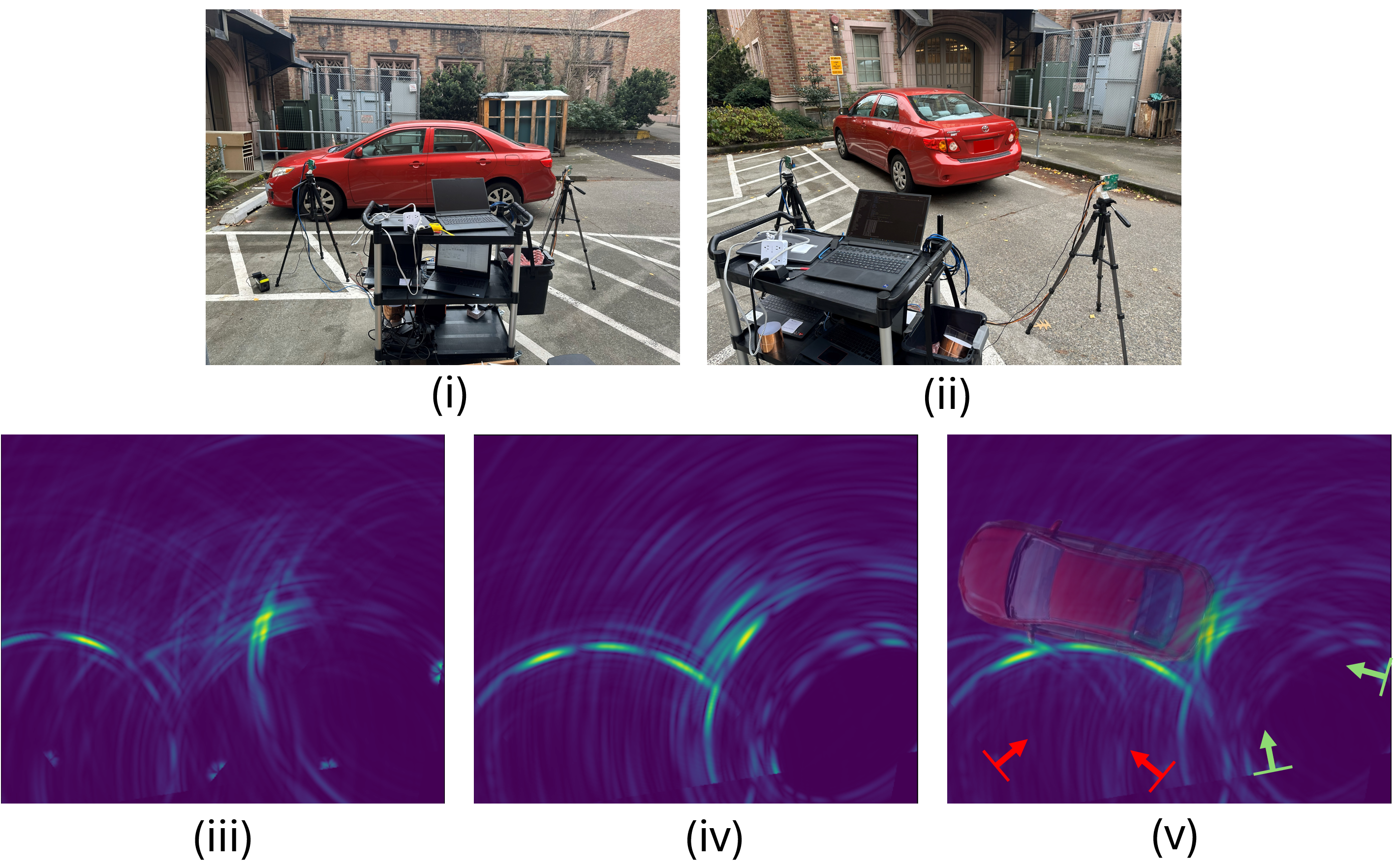
Automotive evaluation: MulDar detects the specular surfaces of a neighboring car that are invisible to conventional mono-static mmWave radars.
If you find this work useful, please consider citing our paper!
@inproceedings{sun2026muldar,
author = {Sun, Xinghua and Li, Qiancheng and Gadre, Akshay},
title = {MulDar: Unleashing the Potential of Distributed COTS mmWave Radar by Exploiting Cross-Device Channels},
booktitle = {Proceedings of the 24th Annual International Conference on Mobile Systems, Applications and Services (MobiSys '26)},
year = {2026},
doi = {10.1145/3745756.3809206},
publisher = {ACM},
address = {New York, NY, USA},
month = {June},
}POLySight: Towards Practical Bi-Static Polarimetric Imaging using Commodity mmWave Radars for Material Sensing
Xinghua Sun, and Akshay Gadre
SenSys 2026
Website GitHub 🤗 Dataset PDF DOI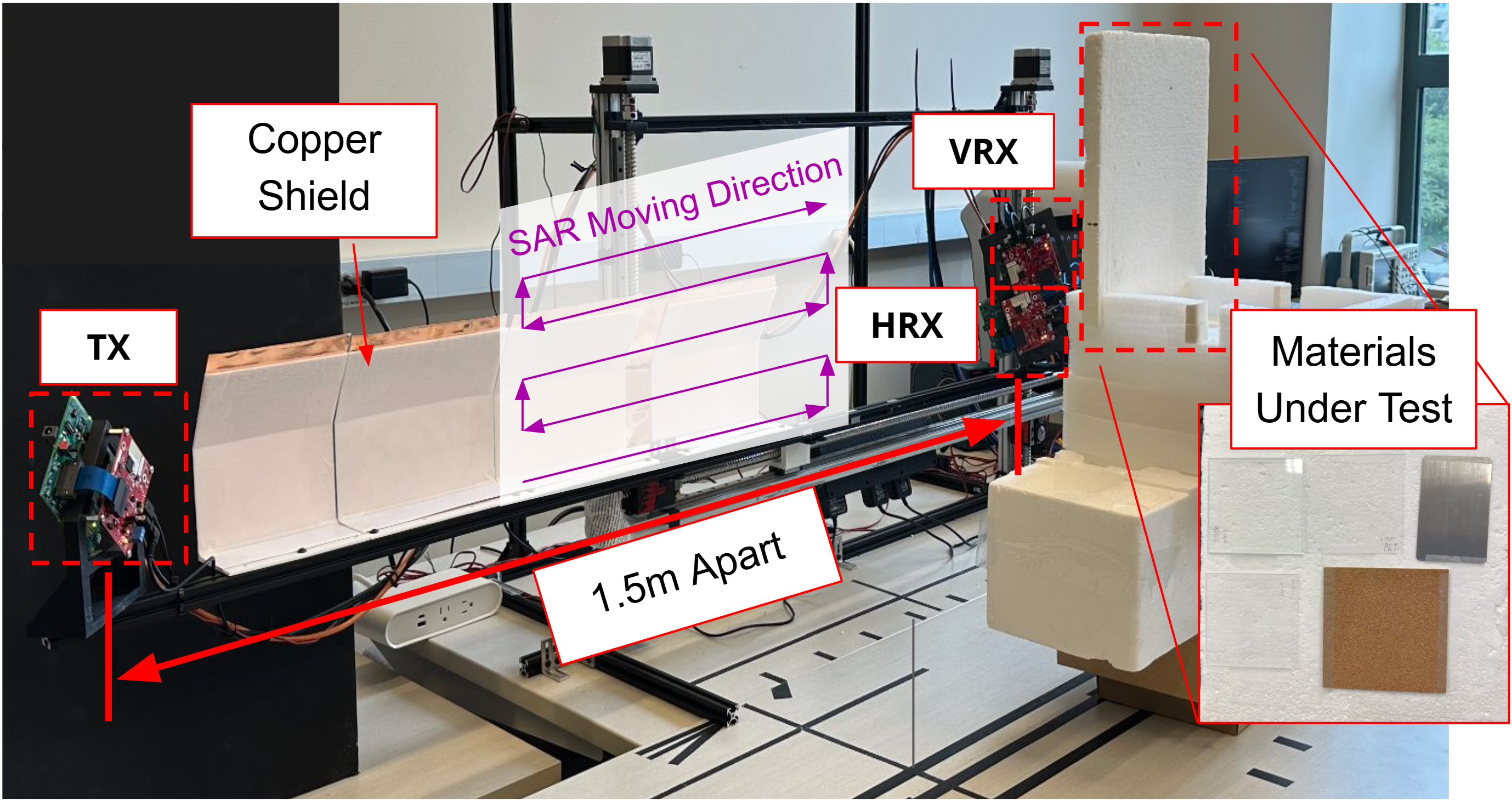
 University of Washington
University of Washington